Clustered Stochastic Optimization for Object Recognition and Pose Estimation
Juergen Gall, Bodo Rosenhahn, and Hans-Peter Seidel
Abstract
We present an approach for estimating the 3D position and in case of articulated objects also the joint configuration from segmented 2D images. The pose estimation without initial information is a challenging optimization problem in a high dimensional space and is essential for texture acquisition and initialization of model-based tracking algorithms. Our method is able to recognize the correct object in the case of multiple objects and estimates its pose with a high accuracy. The key component is a particle-based global optimization method that converges to the global minimum similar to simulated annealing. After detecting potential bounded subsets of the search space, the particles are divided into clusters and migrate to the most attractive cluster as the time increases. The performance of our approach is verified by means of real scenes and a quantative error analysis for image distortions. Our experiments include rigid bodies and full human bodies.
Images
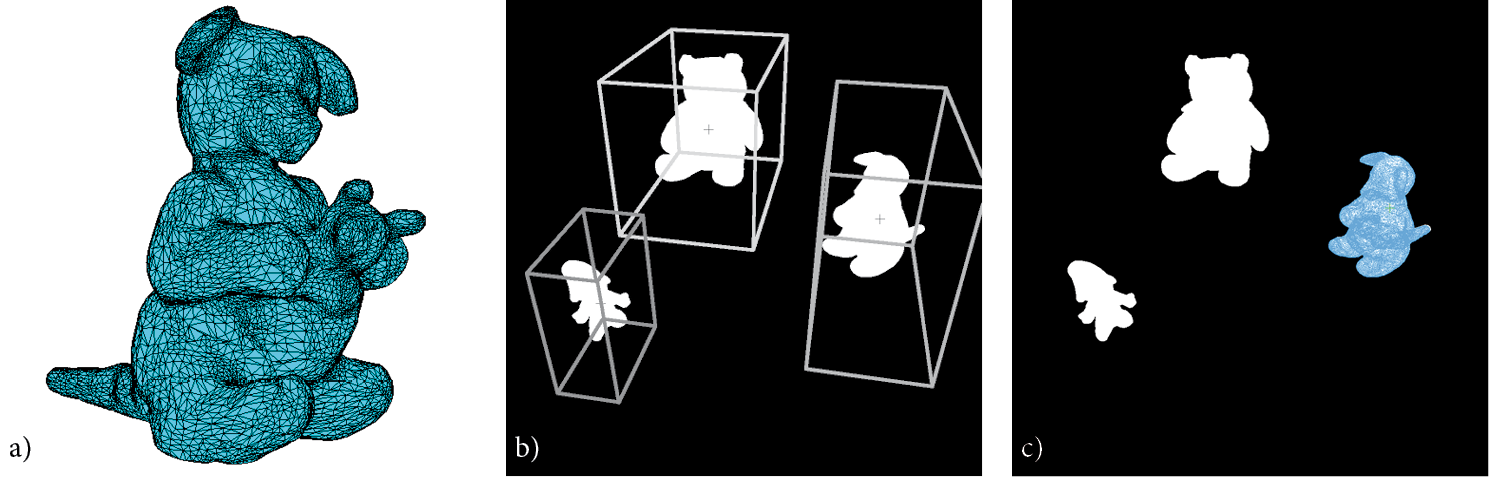
a) 3D model of object. b) Potential bounded subsets of the search space. c) Projection of the mesh. The pose is correctly estimated.

Particles at t=0,5,10,15 and 19 for ISA. Particles with a higher weight are brighter, particles with a lower weight are darker. The particles converge to the pose with the lowest energy as t increases. Most left: Equally weighted particles after initialization. Most right: Estimate after 20 iterations.
Publications
Gall J., Rosenhahn B., and Seidel H.-P., An Introduction to Interacting Simulated Annealing ( PDF), Human Motion - Understanding, Modeling, Capture and Animation, Klette R., Metaxas D., and Rosenhahn B. (Eds.), Computational Imaging and Vision, Vol 36, 319-345, Springer, 2008. © Springer-Verlag
Gall J., Rosenhahn B., and Seidel H.-P., Clustered Stochastic Optimization for Object Recognition and Pose Estimation ( PDF), 29th Annual Symposium of the German Association for Pattern Recognition (DAGM'07), Springer, LNCS 4713, 32-41, 2007. © Springer-Verlag
Gall J., Potthoff J., Schnörr C., Rosenhahn B., and Seidel H.-P., Interacting and Annealing Particle Filters: Mathematics and a Recipe for Applications , Journal of Mathematical Imaging and Vision. Springer, 28(1), 1-18, 2007. © Springer-Verlag
Gall J., Potthoff J., Schnörr C., Rosenhahn B., and Seidel H.-P., Interacting and Annealing Particle Filters: Mathematics and a Recipe for Applications ( PDF), Technical Report MPI-I-2006-4-009, Department 4: Computer Graphics, Max-Planck Institute für Informatik, Saarbrücken, Germany, Sept. 2006. (A revised version of the technical report has been published in JMIV)