Robust Pose Estimation with 3D Textured Models
Juergen Gall, Bodo Rosenhahn, and Hans-Peter Seidel
Abstract
Estimating the pose of a rigid body means to determine the rigid body motion in the 3D space from 2D images. For this purpose, it is reasonable to make use of existing knowledge of the object. Our approach exploits the 3D shape and the texture of the tracked object in form of a 3D textured model to establish 3D-2D correspondences for pose estimation. While the surface of the 3D free-form model is matched to the contour extracted by segmentation, additional reliable correspondences are obtained by matching local descriptors of interest points between the textured model and the images. The fusion of these complementary features provides a robust pose estimation. Moreover, the initial pose is automatically detected and the pose is predicted for each frame. Using the predicted pose as shape prior makes the contour extraction less sensitive. The performance of our method is demonstrated by stereo tracking experiments.
Images/Video
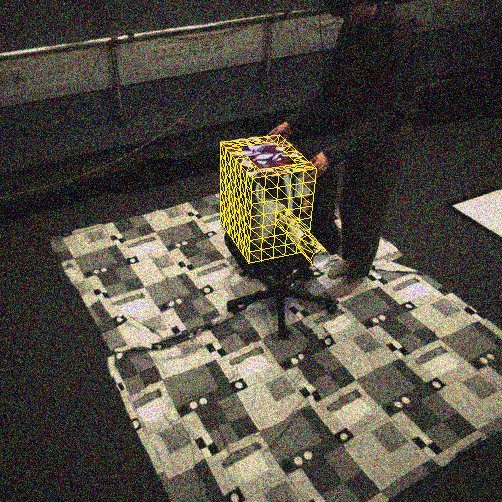
Tracking results for a stereo sequence. (AVI)
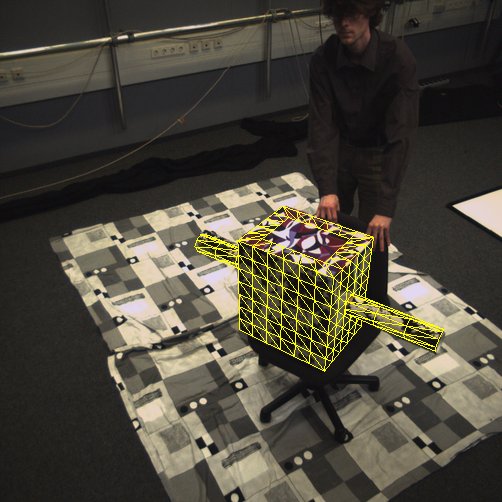
Mulitple moving objects and occlusions. (AVI)
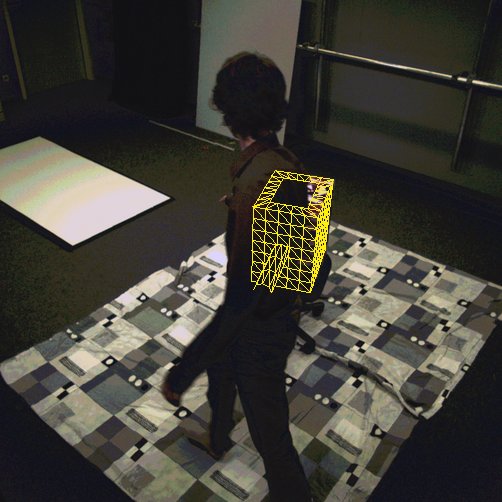
Trackingresults for a stereo sequence. (AVI)

Mulitple moving objects and occlusions. (AVI)
Publications
Gall J., Rosenhahn B., and Seidel H.-P., Robust Pose Estimation with 3D Textured Models ( PDF), IEEE Pacific-Rim Symposium on Image and Video Technology (PSIVT'06), Springer, LNCS 4319, 84-95, 2006. © Springer-Verlag